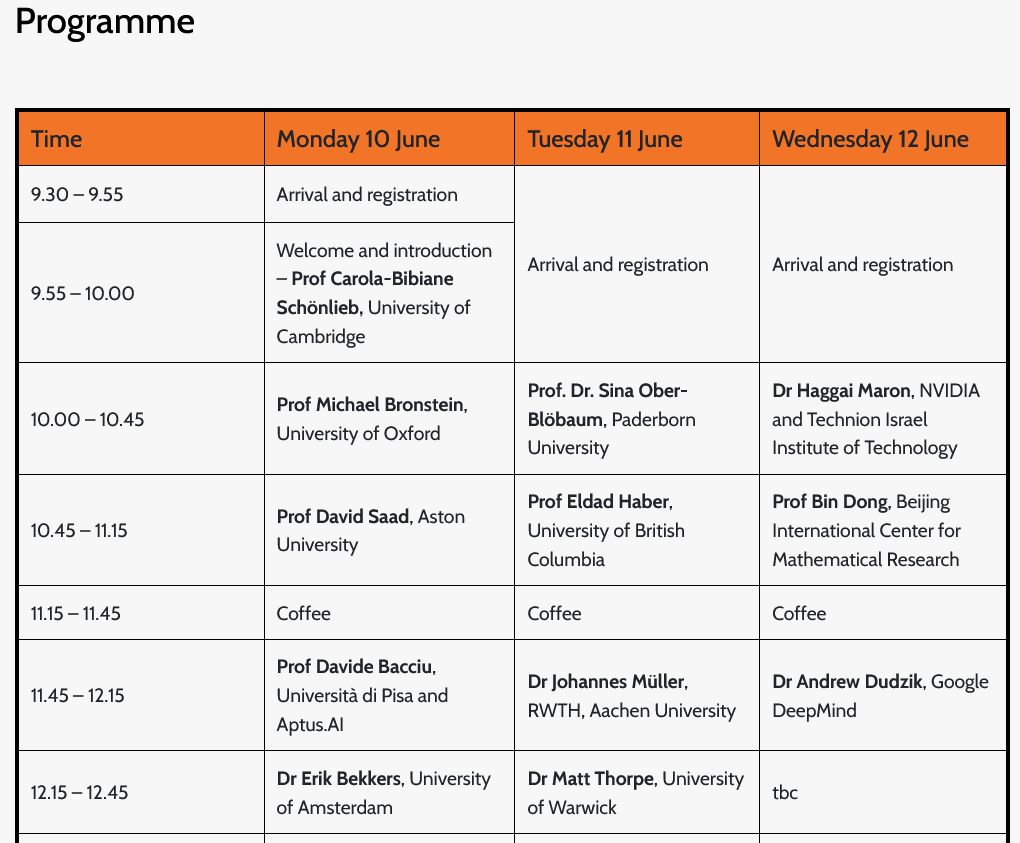
On June 10th I will be in Cambridge for the Geometric Deep Learning workshop to deliver a talk on “Dynamics of Information Propagation in Graph Neural Networks”.
Talks soon online on the Workshop website.
On June 10th I will be in Cambridge for the Geometric Deep Learning workshop to deliver a talk on “Dynamics of Information Propagation in Graph Neural Networks”.
Talks soon online on the Workshop website.
Very productive spring in the lab with 4 newly accepted papers at top ML conferences by Alessio Gravina, Riccardo Massidda and Michele Resta. Congrats guys!
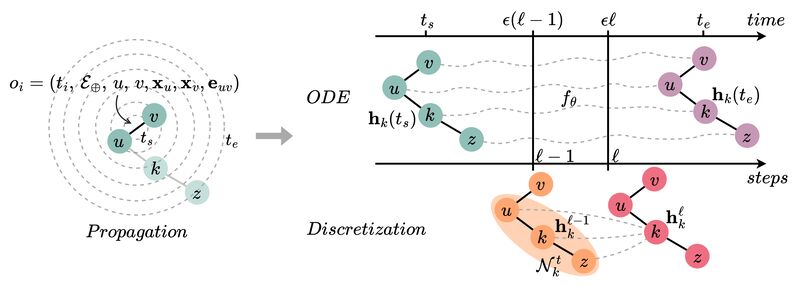
Check here if you are interested in deep learning models for dynamic graphs, as seen through the lenses of neural ODEs:
Gravina, A., Lovisotto, G., Gallicchio, C., Bacciu, D., & Grohnfeldt, C. (2024). Long Range Propagation on Continuous-Time Dynamic Graphs. ICML 2024, https://arxiv.org/abs/2406.02740
Gravina, A., Zambon, D., Bacciu, D., & Alippi, C. (2024). Temporal Graph ODEs for Irregularly-Sampled Time Series. IJCAI 2024, https://arxiv.org/abs/2404.19508
Here is the result of a joint collaboration with Sara Magliacane at University of Amsterdam on learning causal abstractions:
Massidda, Riccardo, Sara Magliacane, and Davide Bacciu. "Learning Causal Abstractions of Linear Structural Causal Models." UAI 2024, https://arxiv.org/abs/2406.00394
Last but not least, learn how you can use your multilingual language model to self-generate experiences to constrast catastrophic forgetting in continual incremental language learning:
Resta, Michele, and Davide Bacciu Self-generated Replay Memories for Continual Neural Machine Translation. NAACL 2024, https://arxiv.org/abs/2403.13130
As part of our new initiative on AI for Space (with news to come about our ContinualIST startup), next Monday 15 April 2024 we are organizing a first workshop in presence at the Computer Science Department and streamed online.
Check on the workshop website for further details on agenda and participation:

COSMO allows graph structure learning in a constraint-free scalable way, bringing computational complexity down from cubitc to quadratic (in number of nodes). Thanks to the COSMOlogists team that made this possible: Riccardo Massidda, Francesco Landolfi and Martina Cinquini.

My interview with AI news on AI history, perspective and strategies in the Italian and European area, with a special mention to our EMERGE Project and the role of awareness in AI systems. Written transcript here (In Italian).

Friday marked a very important personal milestone. The first EU project I coordinated came to an end after a fantastic final review in Athens, thanks to the spectacular TEACHING_H2020 Consortium. These have been an intense 4 years together, which nevertheless let me with the feeling and desire to sail much further with this crew. Stay tuned, as many final results of TEACHING_H2020 are coming up soon!
All set for the Bright Night at Università di Pisa with the TEACHING_H2020 demonstrators. If you are in Pisa and want to challenge your selves with pushing a car with your mind or experience our enhanced racing simulator which can mine your drivers’ reaction with hashtag#AI come visit us at Logge di Banchi, Pisa!
Made possible by the huge effort (and recklessness) of Alessandro Berti and Valerio De Caro

QuantaBrain, our startup developing diagnostic tools for autistic spectrum disorders and quantitative psychiatry, closes its first round of investment with Scientifica Venture Capital.

Here is a video of my recent talk on “Shaping Neural Networks with Dynamical Systems” at the DEEP LEARNING: Theory, Algorithms, and Applications 2023 Workshop in Trento.
In this 25min video I discuss the fundamentals of using dynamical systems’ concepts to imbue non-dissipation properties in neural networks and how we leverage dynamical systems as NNs building blocks in our EMERGE Project.
Video URL: https://drive.google.com/file/d/1RX8b-nCYqgR0sIOZLSkdrxDN35uLMG25/view
Want to know more about the EMERGE Project I am coordinating at University of Pisa? check out our first video on the project concepts.